
Направления разработок в современной робототехнике
![]()
Робототехника развивает разные направления в функционировании роботов.
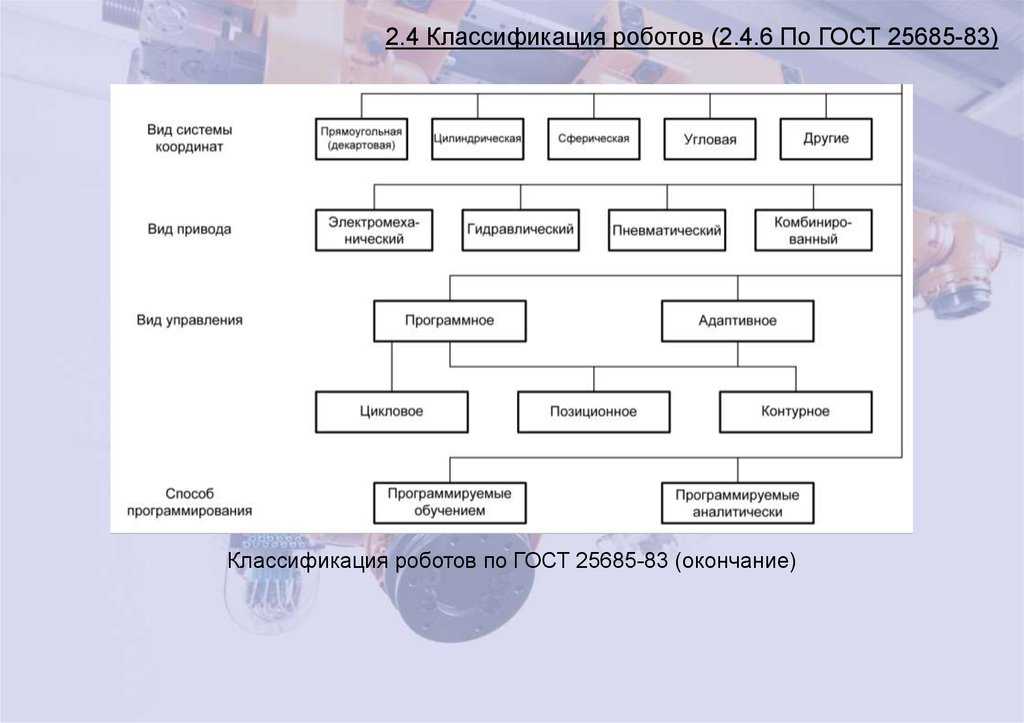
Управление. Сегодня роботы управляются с помощью программ, есть следующие варианты управления:
-
Машины с жесткой программой. В них заложена одна программа с одним вариантом работы, которая не способная меняться. Робот действует всегда и в любых условиях по одному и тому же алгоритму.
-
Адаптивные роботы. В них внедрена сенсорная система, которая считывает внешние условия, а программа в зависимости от них может выбирать один из вариантов работы.
-
Роботы с гибкими программами. Это самые современные модели, которые ориентируются на цель работы, могут не только получать, но и анализировать информацию о внешних факторах. В зависимости от них роботы гибко меняют поведение и выбирают оптимальный вариант поведения и действий.
-
Коллаборативные роботы. Это машины, которые работают в «сотрудничестве» с человеком, то есть их действия не полностью независимы, а контролируются или управляются оператором.
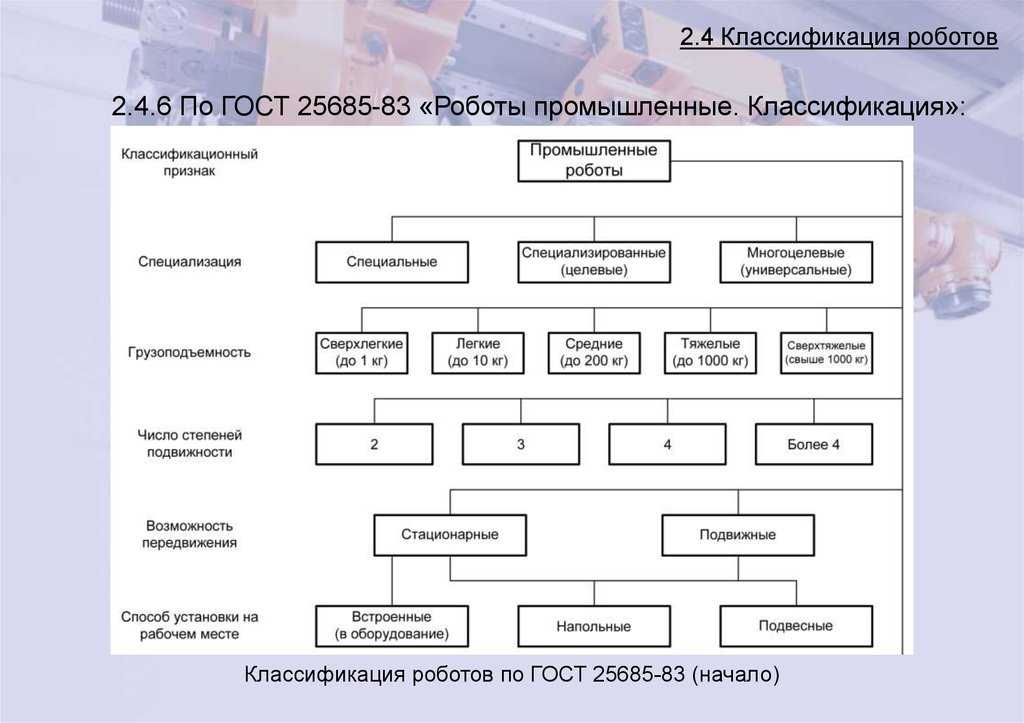
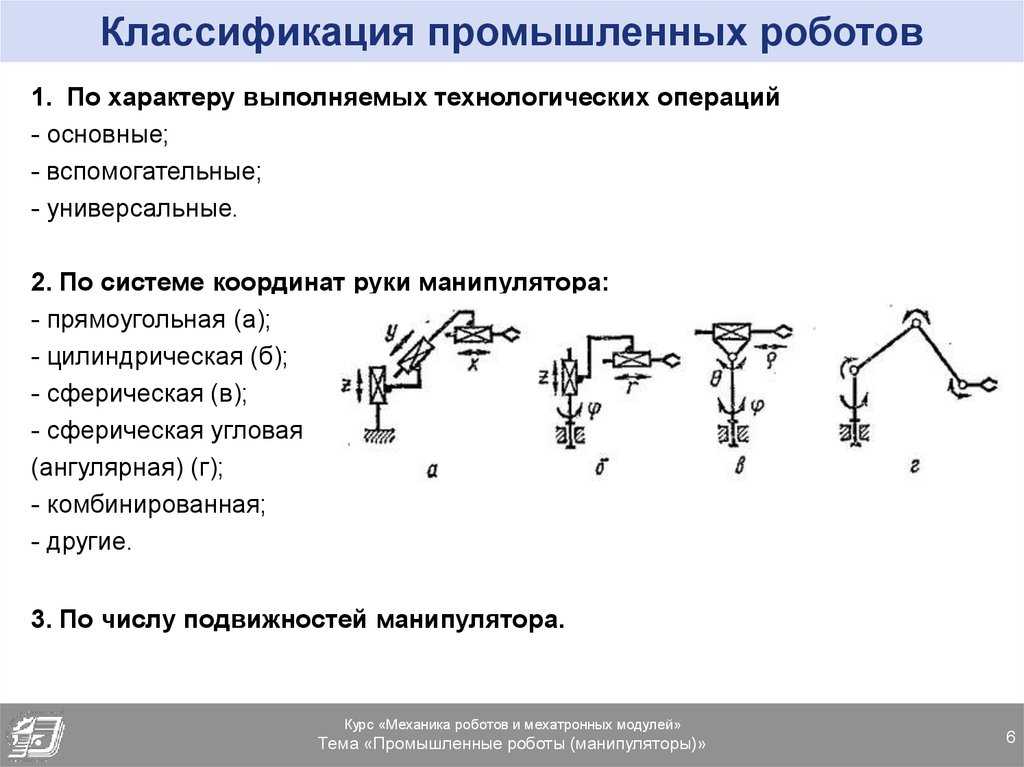
Позиционирование. Роботы программируются с различными системами координат и разным позиционированием в пространстве.
-
С прямоугольной системой координат. Они могут перемещаться по двум либо трем осям — в плоскости или в пространстве.
-
С цилиндрической системой координат. Такие роботы вращаются в одной степени и перемещаются минимум в одном направлении.
-
С полярной системой координат. Подобные агрегаты имеют две степени вращательного движения.
-
Шарнирные роботы уже имеют три и более вращательных степеней.
-
Scara — имеют две вращательные степени, которые передвигаются по параллельным осям.
-
Комбинированные роботы — совмещают разные типы позиционирования и перемещения.
Способ перемещения. Если роботу необходимо передвигаться, он оснащается различными системами перемещения. Их выбор зависит от назначения робота и от того, где он будет применяться. Способы перемещения могут быть изолированы, а могут сочетаться и комбинироваться.
-
Колеса. Робот может иметь разное число колес от одного и более. Колеса также влияют на маневренность.
-
Гусеницы. Роботы на гусеничном ходу имеют высокую проходимость, поэтому они востребованы в сложных природных условиях, в боевых установках и т. п.
-
Имитация человеческих шагов. Такой способ перемещения применяют в основном в человекоподобных роботах-андроидах.
-
Полет. Используются разные механизмы и способы, чтобы поднять робота в воздух. Обычно такие технологии используются в БПЛА разного назначения — от игрушечных до боевых дронов.
-
Плавание. Как и с летающими роботами, есть разные способы «заставить» робота плыть.
-
Имитация движений животных. Робот может имитировать передвижение любых животных, от насекомых до млекопитающих.
Оставьте комментарий, примите участие в опросе
Загрузка …
Посмотрите еще полезные статьи
![]() Беспилотные авто ЛИДАРЫ
Беспилотные авто ЛИДАРЫ
622
Система LiDAR была разработана в 60-ых года прошлого
![]() Беспилотные авто АЭРОТАКСИ
Беспилотные авто АЭРОТАКСИ
439
Не нужно быть поклонником научной фантастики, чтобы
![]() Беспилотные авто ТЕСЛА
Беспилотные авто ТЕСЛА
480
История компании Тесла отходит своими корнями к далекому
![]() Беспилотные авто TESLA MODEL 3
Беспилотные авто TESLA MODEL 3
247
Впервые общественности авто tesla model 3 было представлено
![]() Беспилотные авто TESLA MODEL S
Беспилотные авто TESLA MODEL S
312
Электромобиль Tesla Model S является одной из самых
![]() Беспилотные авто РОССИЙСКИЕ ЭЛЕКТРОМОБИЛИ
Беспилотные авто РОССИЙСКИЕ ЭЛЕКТРОМОБИЛИ
203
Количество электрокаров в мире растёт. Буквально десятилетие
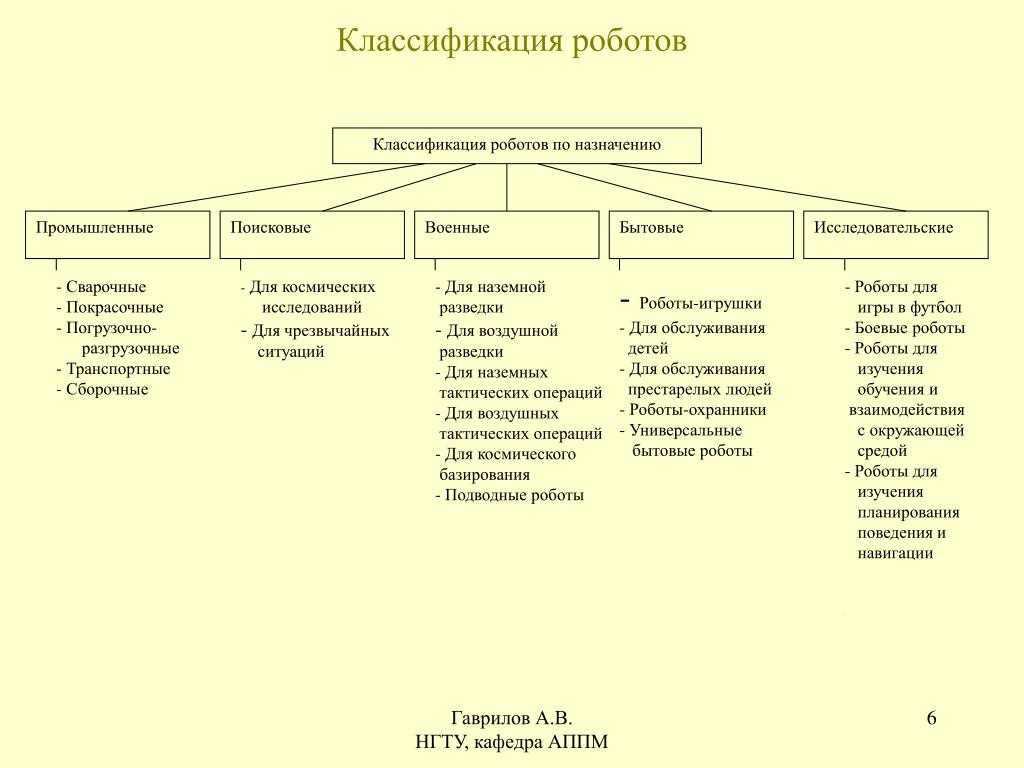
Область применения роботов. Промышленные роботы и сервисные роботы.
Cегодня роботы используются практически повсеместно. В тяжелой промышленности роботов используют и в литейном производстве, и в процессах сборки, и в обработке металлов, в сварочных, покрасочных работах, во вспомогательных работах.
Роботизировано гражданское и промышленное строительство, легкая промышленность, роботы присутствуют на мебельном и деревообрабатывающем производстве. Роботы проникли на пищевое и химическое производство, в сельское хозяйство.
Также роботизированные комплексы используются в угольной, горнодобывающей, нефтяной промышленности, в лесозаготовительном производстве.
В электронной промышленности роботы приспособлены под производство от силовых, распределительных и специализированных трансформаторов до производства оптических приборов и фотографического оборудования и многое другое.
Сервисные роботы и область их применения
В середине 90-х гг. Европейская Экономическая Комиссия ООН и ИСО (Международная организация по стандартизации ISO) приняли предварительную систему классификации сервисных роботов. Их разбили по категориям и типам взаимодействия: бытовые/персональные роботы и профессиональные сервисные роботы.
Бытовые сервисные роботы были созданы для автоматизации различных процессов непосредственно в быту человека и в сфере обслуживания. Такие роботы, как правило, обладают очувствленными системами с элементами интеллекта. Они могут выполнять задачи по приготовлению пищи, уборке, мытью посуды, играм и обучению людей, обслуживанием в общественных местах.
Пример робота-официанта
Также в последние 10 лет приобрели популярность системы “умный дом”, “умный город”, системы видеонаблюдения, сканирования и прочие.
Профессиональные сервисные роботы используются в медицине, здравоохранении и спорте. Они обучают физическим упражнениям, проводят физиотерапию, массаж, роботы участвуют в хирургических и других операциях. Их стали внедрять в процессы диагностики органов, протезировании конечностей, реабилитации больных и инвалидов, уход за больными и помощь при передвижении.







Все эти сервисные роботы не имеют жёсткой регламентации.
Примеры сервисных роботов в сельском хозяйстве
Примеры сервисных роботов в общественном пространстве
Примеры сервисных роботов в логистике
Кроме того, профессиональных сервисных роботов активно используют в космической отрасли, инженерном деле и проектировании. В связи с нарастающим интересом к освоению ресурсов мирового океана во всем мире создаются подводные роботы.
Также роботов стали использовать и в обслуживании авиатехники, системах безопасности, в недрах земли, в экстремальных условиях и различных ремонтных работах. В военной промышленности роботы активно используются в операциях разминирования, беспилотных систем, в подводных работах, как наземные транспортные средства и т.д.
С 1997 года IFR (international Federation of Robotics) ежегодно собирает статистические данные о сервисных роботах. К сожалению, пока статистика довольно скромная, так как данные собираются непосредственно от производителей сервисных роботов.
По данным экспериментального исследования ЕЭК ООН/ПКИ, проведенном в 2008 году среди некоторых крупных робототехнических компаний, средний срок службы робота составляет примерно 12-15 лет.
Кобот. Что это такое?
Кобот (Collaborative Robot) – это коллаборативный/коллективный робот. Идея разработки коботов появилась в 1996 году в рамках исследовательского проекта Фонда General Motors.
В основе концепции разработки коботов была идея – создать безопасных роботов, которые могли работать с людьми “рука об руку”. Спустя двадцать лет коботы приобрели большую популярность на многих предприятиях, но сейчас не все могут отличить их от обычных роботов.
Основные отличия коботов от роботов:
1. Партнерство в команде человек-машина. Классические промышленные роботы – это силовые машины, которые выполняют операции, прописанные в программах, не взаимодействуя с людьми. Вокруг них, во избежание травм, устанавливают специальные ограждения и клетки;
Коботы были специально разработаны для совместной работы с человеком. Их не огораживают, позволяя осуществлять ручную сборку и контроль качества изделия на месте. Основная задача коботов – полностью решить те сложные задачи, которые нельзя полностью автоматизировать;
2. Предотвращение опасных ситуаций. Коботы выполняют задачи, которые могут стать травмоопасными. Такое перераспределение работ приводит к уменьшению числа аварий и нежелательных последствий;
3. «Умное» и безопасное поведение. Коботы останавливаются при малейшем прикосновении к человеку. Он оснащён специальными датчиками, предотвращая несчастные случаи. Ограждения становятся не нужны;
4. Гибкость и обучаемость. Коботы просты в программировании и перепрограммировании. Некоторые коботы даже обладают навыками самообучения;
5. Мобильность и экономия энергии. Коботы обладают меньшим весом, чем промышленные роботы. Их легко перемещать и устанавливать на любых поверхностях и в разных точках производственной цепи. Их можно установить даже на потолке. Сделать это может самостоятельно даже один рабочий. Они потребляют мало энергии;
6. Сравнительно малая стоимость по сравнению с промышленными роботами;
7. Малая скорость и меньшая мощность по сравнению с промышленными роботами.
Лидерами по производству коботов в мире на данный момент являются Universal Robots, Bosh, Kawada Industries, F&P Personal Robotics, Kawada Industries, MABI Robotic, MRK Systeme, Rethink Robotics и Fanuc.
Взаимодействие системы человека и кобота в промышленных условиях стало возможным благодаря разработке стандарта ISO / TS 15066: 2016 “Роботы и роботизированные устройства”, а также новой технической спецификации ISO для безопасной работы с роботами. Работа над ISO / TS 15066 начиналась с определения границ, чтобы не было случайного контакта между человеком и машиной, который бы привёл к травме человека и продолжается до сих пор.
Также в 2012 году был выпущен документ ISO 8373:2012 “Роботы и роботизированные устройства”, который заменил старый ISO 8373: 1994 “Системы автоматизации и интеграции” . Новая редакция была переработана и расширена, и включила как промышленных, так и сервисных роботов. В настоящее время ведётся переработка этого документа, новая редакция которого выйдет в свет в 2021 году.
ISO (Международная организация по стандартизации) является всемирной федерацией национальных органов по стандартизации (органов-членов ISO). Работа по подготовке международных стандартов обычно осуществляется через технические комитеты ISO. Основная задача технических комитетов заключается в подготовке международных стандартов, проекты которых, принятые техническими комитетами, распространяются среди органов-членов для голосования.
Сегодня вопросами роботизации занимается специально созданный комитет, который работает в этом направлении и посвящен робототехнике – ISO / TC 299. Последнее рабочее совещание ISO / TK 299 было проведено в Киото в июне 2018 года. Третье пленарное заседание ISO / TC 299 состоится в Стокгольме в 2020 году.
Пример кобота:
Роботы стали частью повседневности. Мы не мыслим себе жизнь без кибер-систем, гаджетов, интернета вещей, облачных сервисов и виртуальной реальности. Мы живём во время 4-й промышленной революции, повсеместной роботизации, или – Индустрии 4.0.
В целом, мы можем с уверенностью сказать, что наша жизнь практически полностью идёт рука об руку с автоматизацией многих процессов и роботы прекрасно её дополняют: от работы на станках и компьютерах до приготовления пищи и общения. В следующих материалах мы расскажем о том, как роботы влияют на мировую экономику и рабочий класс.
Ссылки на материалы: 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Что такое коллаборативный робот?
![]()
В современном мире все чаще используются так называемые промышленные коллаборативные роботы, или, как их еще называют, коботы. В чем разница между современными коботами и уже известными нам традиционными промышленными роботами?
В основу понятия коллаборативный промышленный робот легло, как ни странно, понятие “коллаборация”. Соответственно, это машины, созданные для того, чтобы работать вместе с людьми.







Именно в этом заключается разница между “обычным” промышленным роботом и современным коботом. Мало того, что “обычные” опасны для человека (они работают в специальной робоячейке, которая фактически съедает полезное место в цеху), так еще и требуют больших затрат.
Проблемы промышленных роботов:
- сложное программирование
- требуют узких знаний специалистов
- только под многосерийные задачи
- опасен для человека
- предприятие вынуждено нести расходы на дорогих собственных специалистов или привлекать дорогих со стороны
- огражден специальной клеткой – занимает много места в цеху
Проблемы современного производства – мелкие заказы, отсутствие крупных серий для автоматизации конкретной задачи, дорогие специалисты, текучка кадров и другие — можно решить с помощью новых коботов.
Коллаборативный робот легко и быстро учится выполнять новые задачи, причем не требуя при этом каких-то специальных знаний — вполне хватит тех, что получены при первой интеграции.
![]()
Благодаря специальным датчикам, которые останавливают его при столкновении, коботы становятся безопасными для человека.
Кроме того, промышленные коботы имеют открытую архитектуру, что позволяет существенно расширять их возможности. Многие компании предлагают готовые решения для такой техники: захваты, техническое зрение, программы и многое другое. В итоге пользователь кобота вполне может настраивать своего робота на разную работу без особых затрат и усилий.
Решение на поверхности — плюсы коллаборативных роботов:
- работают по мелкой серии
- мгновенно переключается на другую операцию в рамках одной задачи (сменилась деталь на станке)
- его можно быстро перенастроить на совершенно иную задачу (загружал станок сегодня, завтра уже шлифует или сваривает металл)
- безопасен для людей и оборудования
- не требует ограждения
- если нужно сделать единичную продукцию на станке — не проблема, рабочее место оператора практически не меняется.
Перспективы применения
С каждым годом робототехника становится все доступнее. Это одна из причин стремительно увеличивающейся автоматизации работы предприятий.
За последние десять лет роботы стали дешевле почти на 30%. Эксперты прогнозируют, что в ближайшее время такая техника станет доступнее еще более чем на 20%.
Отметим, что труд машин сейчас популярен не только на предприятиях-гигантах, но и в сфере малого и среднего бизнеса.
Сегодня практически все изготовители робототехники производят коллаборативных роботов и роботов-манипуляторов для МСП
Однако, крупные производства тоже обращают на них внимание наряду с классическими промышленными роботами.. Из вышесказанного можно сделать несколько выводов:
Из вышесказанного можно сделать несколько выводов:
- роботы удачно заменяют людской труд. Каждая машина может взять на себя работу нескольких десятков живых сотрудников
- роботы обходятся компаниям дешевле, чем люди;
- условно за 1-2 года использования, роботы полностью окупаются, а также способствуют увеличению выработки той или иной продукции, без брака!
Какие основные преимущества коллаборативных роботов?
- Экономия средств для оплаты рабочей силы;
- Высокая скорость процессов на производстве;
- Большая точность и минимум брака;
- Энергоэффективность;
- Меньшие затраты на обработку;
- Повышение качества управления;
- Доступные цены на оборудование;
- Мобильность при выполнении разных задач.
Вывод
![]()
В реалиях современного производства лучший промышленный робот — это промышленный коллаборативный робот. В разделе «Промышленные коллаборативные» Вы можете ознакомиться с моделями коботов, которые предлагает наша компания. Специалисты компании Technored помогут подобрать Вам подходящий вариант, исходя из поставленных задач и предпочтений.
Вернуться к списку
Какие виды роботов используются
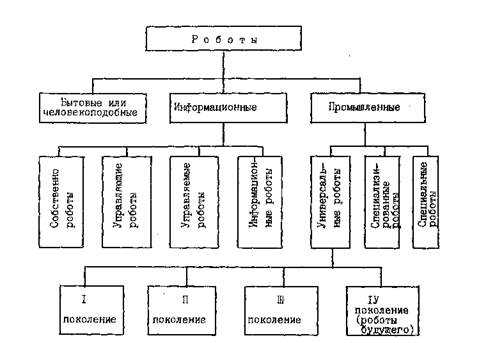
Нет единой картотеки, содержащей самые распространенные типы автоматизированных устройств. Однако, общая классификация промышленных роботов включает следующие:
- автоматы;
- биотехнические модели;
- интерактивные устройства.
Роботы-автоматы подразделяются на следующие группы:
- Программные. Этот вид рассматриваемых устройств запрограммирован на выполнение одной операции.
- Адаптирующиеся. Эти разновидности снабжены датчиками и дополнительными программными продуктами, с помощью которых могут в отведенных рамках оценивать окружающую обстановку. С помощью сигналов сенсоров принимается то или иное решение об исполнении очередности операций.
- Обучаемые модели. Можно менять порядок действий в широких пределах, составляя новые последовательности команд. Это делает изделия универсальными.
- Интеллектуальные комплексы. Способны к самообучению на основе приобретенного опыта.
![]()
Биотехнические комплексы:
- Командные манипуляторы. Управление устройством оператор производит дистанционно. Отдельные команды подаются для движения каждого сегмента.
- Копирующие. Повторяют движения оператора.
- Полуавтоматические манипуляторы. Оператор задает только конечную точку перемещения. Остальные действия машина выполняет самостоятельно.
Интерактивные системы делятся на:
- Автоматизированные. Попеременно управляются в автоматическом и биотехническом режимах.
- Супервизорные модели. Работа выполняется по замкнутому циклу, но команды перехода от одного действия к другому задает человек.
- Диалоговые роботизированные комплексы. Оператор общается с устройством с помощью голосовых команд или на другом языке программирования.
Основы роботов
![]()
У подавляющего большинства роботов действительно есть общие черты. Прежде всего, почти
у всех роботов есть подвижное тело. Некоторые обладают только моторизованными колесами, у других есть
десятки подвижных сегментов, как правило, из металла или пластика. Как кости в вашем теле, отдельные
сегменты соединяются вместе с помощью суставов.
Колеса робота и поворотные суставные сегменты активизируются при помощи приводов разного
рода. Некоторые роботы используют электродвигатели и соленоиды в качестве актуаторов (приводов);
некоторые используют гидравлическую систему; некоторые — пневматическую систему (на основе сжатых газов).
Роботы могут использовать все эти типы приводов.
Робот нуждается в источнике питания, чтобы управлять этими приводами. Большинство роботов
либо оснащены батареей, либо работают от розетки. Гидравлическим роботам нужен насос для создания давления
в гидравлической системе, а пневматическим роботам нужен воздушный компрессор или баллоны со сжатым воздухом.
Все приводы подключаются к электрической цепи. Цепь напрямую питает электродвигатели и
соленоиды, что активизирует гидравлическую систему при помощи электрических клапанов. Клапаны направляют
сжатую жидкость через машину. Для перемещения гидравлической ноги, например, оператор робота должен открыть
клапан, ведущий от жидкостного насоса к поршневому цилиндру, закрепленному на ноге. Жидкость под давлением
будет двигать поршень, толкая ногу вперед. Чтобы двигать конечностями в обоих направлениях, роботы
используют поршни, которые могут толкаться в обе стороны.
Компьютер робота управляет всем, что подключено к цепи. Чтобы передвигать робота,
компьютер активирует все необходимые двигатели и клапаны. Большинство роботов можно перепрограммировать,
чтобы изменить поведение — достаточно просто ввести новую программу в компьютер.





Не у всех роботов есть система сенсоров, и лишь некоторые обладают способностью видеть,
слышать, чувствовать запах или вкус. Самая распространенная способность робота — способность ходить и
наблюдать за своим перемещением. Стандартная конструкция использует колеса с щелью в суставах робота.
Светодиод на одной стороне колеса пускает луч света через щель, чтобы подсветить датчик света на другой
стороне колеса. Когда робот движет определенным суставом, колесо с щелью крутится. Щель разбивает луч
света по мере вращения колеса. Световой датчик считывает поведение светового луча и передает данные на
компьютер. Компьютер точно может сказать, как вращается сустав в определенной модели. По тому же принципу
работает компьютерная мышь.
Новое время: золотой век автоматонов
Однако настоящую популярность и бурное развитие автоматические механизмы получили с началом эпохи Возрождения. Наука, вырвавшись из монополии Церкви, получила дополнительный импульс к развитию, в том числе за счет переосмысления достижения античных ученых. И на первую роль в новой волне старинной робототехники вышли часовщики. Здесь стоит упомянуть о двух важных изобретениях, которые способствовали развитию технологии автоматонов – пружинному и маятниковому заводным механизмам. До этого подобные устройства приводились в движение гирями, что позволяло создавать только крупные и относительно несложные изделия. Новые накопители энергии (пружина и маятник) стали настоящим прорывом в миниатюризации автоматических механизмов.
Особенно прославился на этом поприще мастер Жак де Вокансон, который жил в 18 веке – к слову, в детстве обучавшийся в иезуитской школе. Особенную популярность получили два его изобретения:
- механическая утка, способная взмахивать крыльями, клевать зерно с руки и даже испражняться;
- автоматический музыкант, умеющий наигрывать различные мелодии на флейте и свирели.
![]()
Другим известным мастером был швейцарец Пьер Жаке Дро, живший в том же 18 веке и основавший знаменитую часовую компанию Jaquet Droz. В то время он прославился не только своими хронометрами, но и множеством сложнейших устройств, среди которых особенно известно три его творения:
- «Писарь» – автоматическая фигура мальчика, содержащая около 4 000 деталей, была способна написать любой текст из 40 знаков, самостоятельно макая перо в чернильницу;
- «Художник» – похожий автомат, только вместо текста наносивший на бумагу различные рисунки, например портреты людей, изображения животных и т. д.;
- «Девушка-музыкант» – автомат в виде органистки, который умел наигрывать на небольшом органе 5 различных мелодий, при этом двигая головой и телом, а в конце выступления изящно кланяясь.
![]()
Отличительной чертой этих автоматонов была возможность их программировать, для чего использовались барабаны или диски с насечками, в которых была закодирована последовательность действий. Поменяв их расположение, мастер мог заставить свои устройства написать различные тексты, сыграть другую мелодию и т. д. И все же утверждать, что именно он создал первого робота, нельзя – его механизмы еще слишком мало взаимодействовали с внешней средой, а их функции были сугубо развлекательными.
Технология создания подобных устройств получила широкое распространение не только в Европе, но и мире. В конце 18 века в Японии была создана автоматическая девушка, способная стрелять из лука. В Эрмитаже выставлены знаменитые часы с павлином, купленные Екатериной Великой в Британии. Вклад российских мастеров здесь тоже есть – при перевозке в Россию механизм сильно повредился, но знаменитый изобретатель Кулибин смог полностью восстановить его.
Изготовление автоматонов развивалось по пути не только усложнения, но и миниатюризации устройств. Если первые образцы таких механизмов занимали достаточно много места, то к 19 веку их часто умещали в карманные часы. В основном это были сугубо развлекательные устройства, изготавливаемые для аристократов, передвижных цирков, выставок и т. д. Однако пройдет совсем немного времени, и автоматы начнут помогать людям.
Какие знания необходимы для создания робототехники?
Современная робототехника строится на знаниях из области программирования, механики, мехатроники, электротехники, электроники и автоматического управления.
Для освоения робототехники на базовом уровне достаточно школьных знаний по математике и физике. Без понимания физики движения и принципов работы механизмов и электродвигателей сложно собрать функционирующего робота.
Затем идут информатика и проектирование
Так как программирование необходимо в робототехнике не меньше математики, важно разбираться в компьютерных науках и информационных системах. Проектирование поможет создавать удобные продукты
Но знания из других инженерных дисциплин тоже будут полезны.
Основные направления в изучении робототехнике:
- Машиностроение изучает физические составляющие робота — его «тело». Подтемы — механика и сопротивление материалов. Большинство курсов в этом направлении ориентированы на физический дизайн и приведение робота в действие.
- Электротехника и электроника или «нервная система» занимаются электрическими системами внутри робота, встроенными системами, низкоуровневым программированием и теорией управления. Обычно это автоматизация, которая строится вокруг контроля робота.
- Информатика — многие специалисты пришли в робототехнику благодаря увлечению компьютерными науками. Инженеры этого направления концентрируются на программном обеспечении робота и высокоуровневом программировании. Среди тем — искусственный интеллект, навигация, техническое зрение, обработка естественного языка и так далее.